














Stepper Motion Control Ease with Servo System Performance
4-Axis EtherCAT interface added to the PB Series closed-loop stepper system's features.
EtherCAT stepping motor systems to improve takt time and smooth equipment operation.
The PB Series 4-axis stepper drive’s EtherCAT interface saves space and wiring
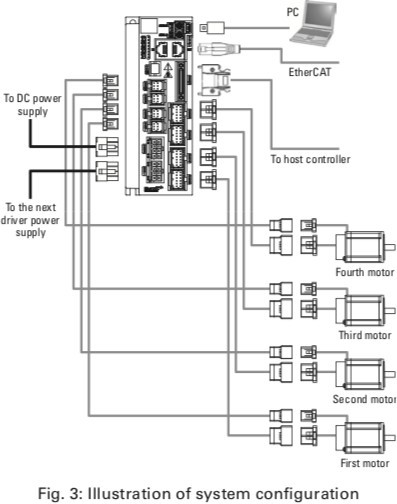
The new model is a 4-axis integrated driver that supports EtherCAT communication. Figure 3 shows the illustration of system configuration.
It can control up to four motors with only one LAN cable. Moreover, there is no need to have one power cable or I/O signal cable for each motor as these can be made common, thus reducing the amount of wiring necessary. Furthermore, two power connectors are available for power cable use, enabling a daisy chain connection on devices where multiple drivers are used in series.
Compatibility with the pulse train input, 4-axis integrated stepper driver.
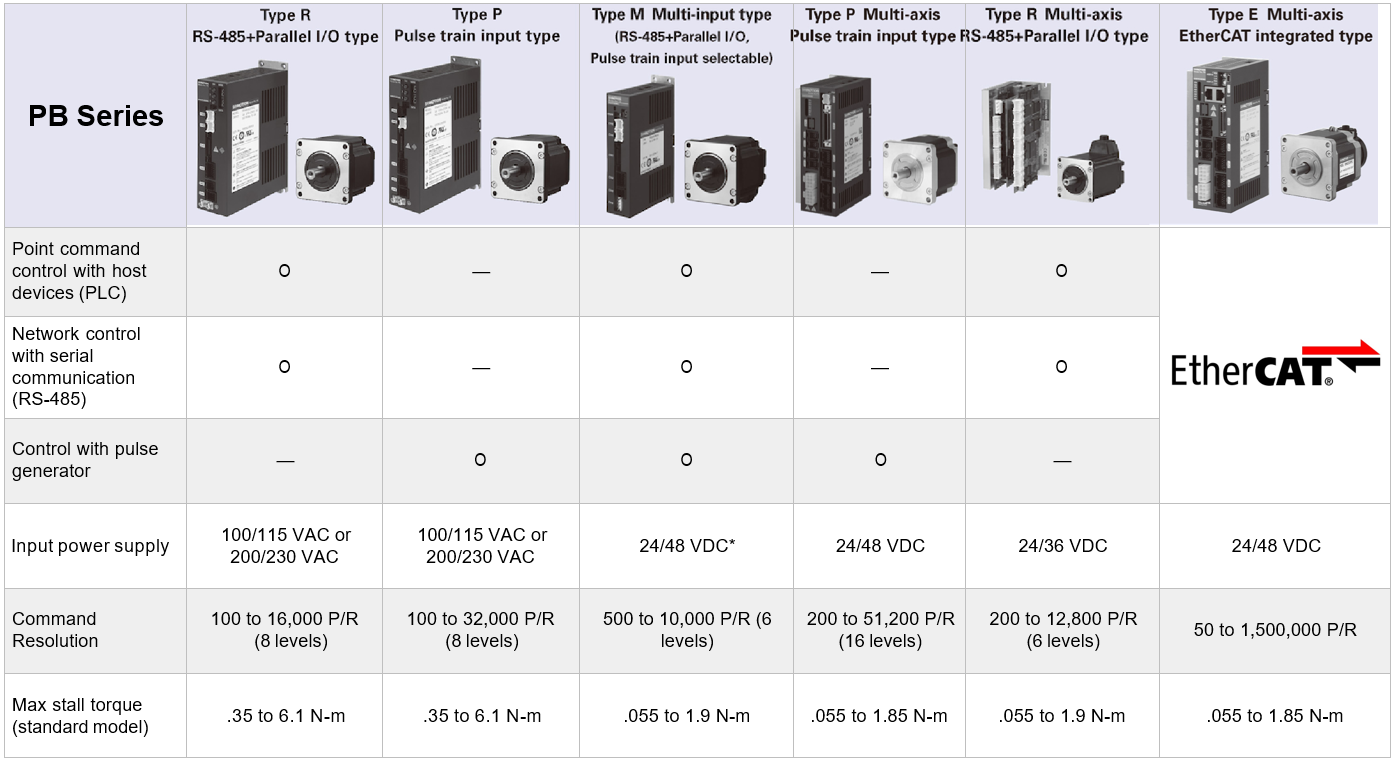
The external dimensions, motor connector, encoder connector, and power connector of the PB Series EtherCAT model are the same as those of the pulse train input 4-axis integrated drivers, and its motor characteristics are equivalent. This makes transition from a pulse train command system to a network system easy.
.25 ms EtherCAT cycle time and smooth equipment operation.
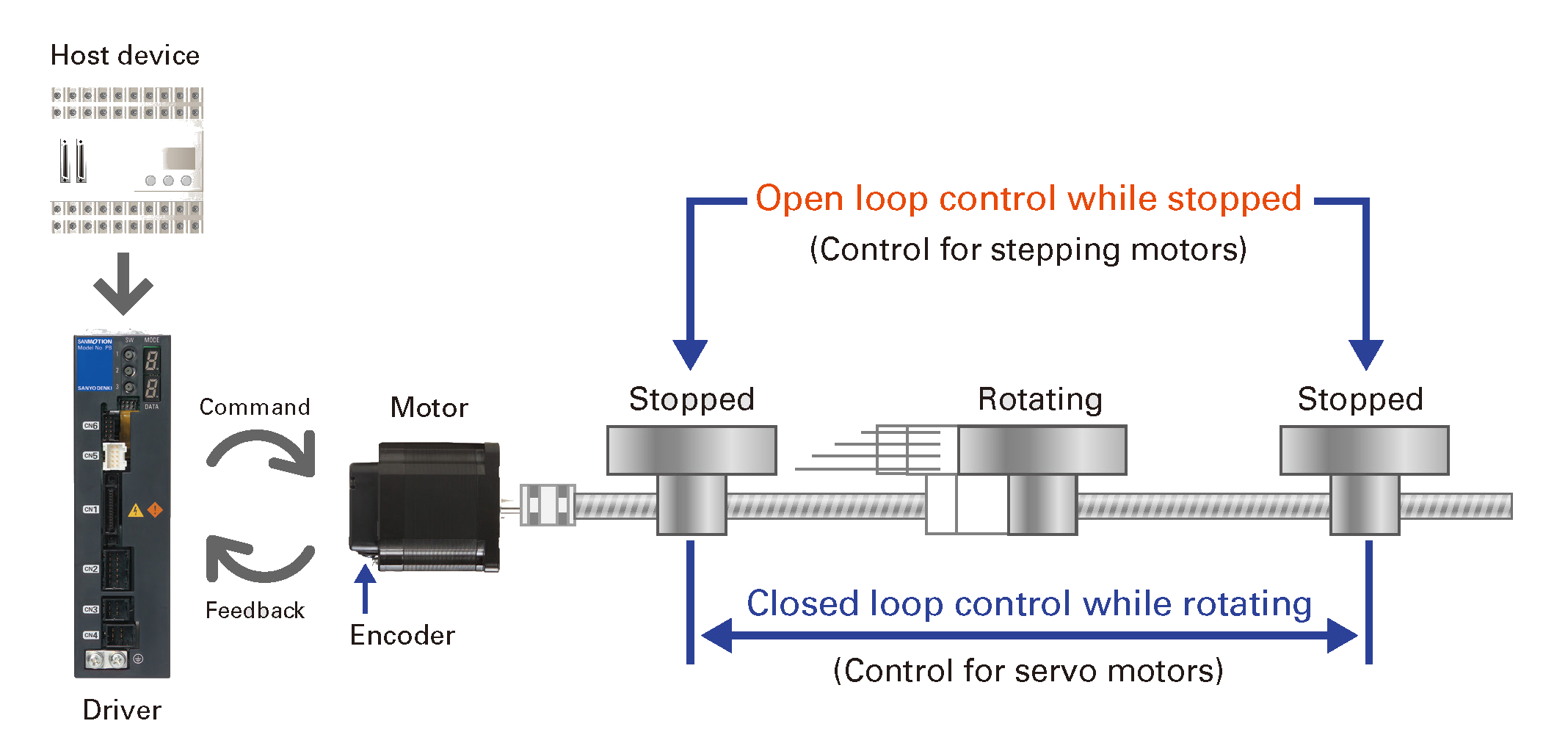
Compared to the current PB Series models, the new EtherCAT stepper drive model has reduced EtherCAT’s minimum communication cycle from 1 ms to 0.25 ms. Position and speed commands can be finely subdivided and sent, enabling smoother equipment operation. Furthermore, all operation modes support “low-deviation closed loop control” as well as the current closed loop control. This control method achieves the same level of following ability of the system relative to the position command as an open loop stepping motor, while being free of step-out. By using this control method, deviation during driving is lowered and this enables to perform such operations as interpolation on X-Y tables which require high following ability to commands, such as the arc interpolation on X-Y tables, etc.
Enhanced encoder support.
In the past, incremental encoders and absolute encoders required separate drivers, but this new model can connect to both encoders. The absolute encoder doesn’t require the “return to home position” operation, and can be recovered quickly after maintenance. Moreover, there is no need for limit sensors or home position sensors, simplifying the maintenance and reducing the man-hours required for wiring tasks.
Meanwhile, incremental encoders are effective for building low-cost systems. For the new model, a different encoder can be used for each axis, meaning that the respective advantages of each can be fully leveraged.
Improved analysis function.
The new model supports “SANMOTION Motor Setup Software”, which is a user support service for system start-up. In the same way as the pulse train input 4-axis integrated driver, it uses operation tracking, trial operation, alarm history, drive record function, and the like to perform analysis in the event of an error. The new model uses a USB 2.0 PC interface and connection can be easily made with commercially available cables. Moreover, by improving communication speed, analysis data can be swiftly acquired, alleviating the burden on the user during analysis.
Closed-loop servo performance with the ease of a stepper system.
Resources to size your stepper motor system and plan your equipment design.
| Resource | Link | Format |
|---|---|---|
| Catalog | PB Series Stepper System Catalog | |
| Sizing Software | PB Series Stepper System Sizing Software | .exe, PDF manual, ReadMe.txt |
| Product Search | Advanced Specification Search | HTML |
| User Manuals | PB Series Stepper System Manuals | |
| Technical Report | PB Series 4-axis EtherCAT Stepper System |